이종호 교수 연구팀, 장애물 피해 안전한 장소 찾아 스스로 착륙하는 AI 드론 기술 개발
작성자전체관리자 조회수1,649 Date2024-03-22
이종호교수_임정근박사_유형욱학생.png [1,105.6 KB]
그림1_개념도.jpg [1,041.2 KB]
이종호교수님_네이버뉴스_장애물 피해 요리조리스스로 안전 착륙하는 AI 드론.pdf [243.5 KB]
그림1_개념도.jpg [1,041.2 KB]
이종호교수님_네이버뉴스_장애물 피해 요리조리스스로 안전 착륙하는 AI 드론.pdf [243.5 KB]

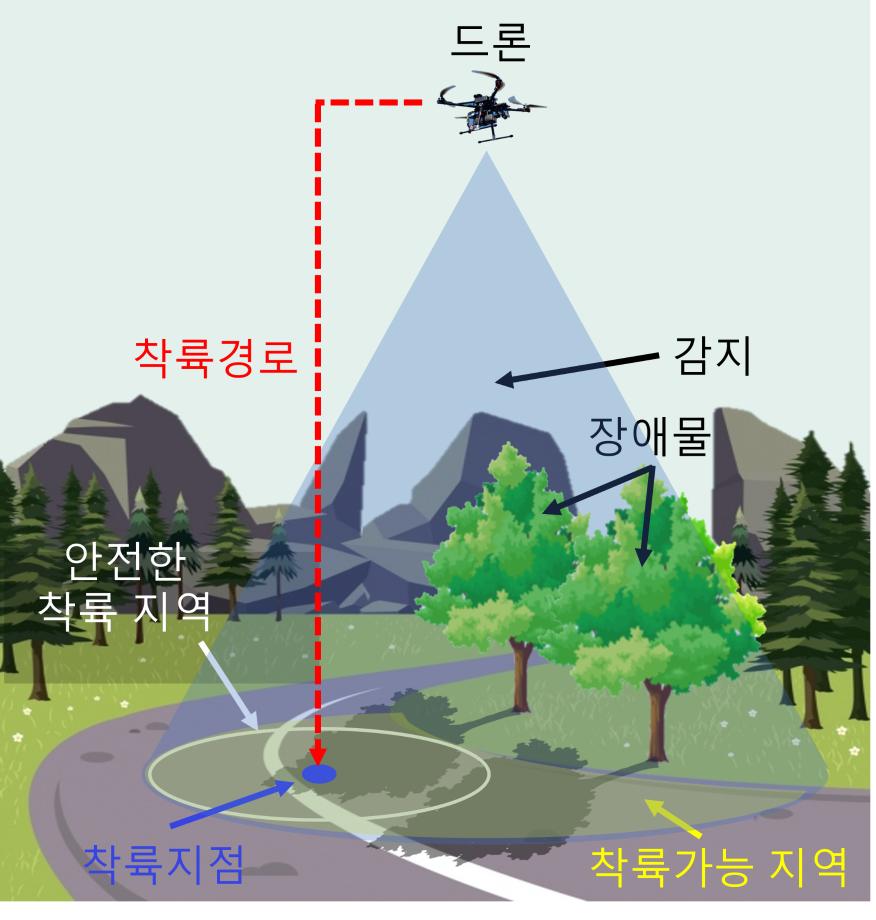
이종호 교수 연구팀에서 드론이 스스로 안전한 장소를 찾아 자동으로 착륙하는 드론 기술을 개발했습니다. 기존 연구에서는 대체로 한 종류의 센서를 이용하여 착륙 지점을 찾았으나, 본 연구팀은 시각 정보를 제공하는 카메라 센서와 거리 측정을 통해 지형 정보를 제공하는 라이다 센서를 이용함으로써 드론 스스로가 더욱 안전한 착륙 지점을 판단하도록 하는 연구를 수행하였습니다. 딥러닝 기술을 통해 카메라로 촬영한 이미지를 착륙할 수 있는 지역과 없는 지역으로 구분하고, 라이다 센서를 드론의 2축 짐벌에 설치함으로써 지면의 높낮이를 측정, 지면의 기울기를 계산해 착륙이 가능한 평평한 지면을 찾습니다. 연구팀은 자연 환경과 장애물이 있는 도심을 포함한 다양한 환경에서 실험을 수행하였고, 드론이 스스로 안전하게 착륙하는 것을 확인했습니다. 주변 환경에 대한 사전 정보 없이도 무인 항공기의 안전한 착륙을 가능케 함으로써, 미래의 스마트 모빌리티 산업 발전에 크게 기여할 것으로 기대됩니다.
기사 링크: https://n.news.naver.com/article/422/0000651159?sid=105
논문 정보
- 저널명 : IEEE/ASME Transcations on Mechatronics (JCR기준 기계공학분야 상위 6.2%)
- 논문명 : Autonomous Multirotor UAV Search and Landing on Safe Spots based on combined Semantic and Depth Information from an onboard Camera and LiDAR
- 저자 정보 : 이종호 교수(교신저자, GIST), 임정근 박사(제1저자, (주)로보티즈), 김명균 석사(플로틱), 유형욱 석박사 통합과정 (GIST)